Soft Robotics
Details coming soon.
Programmable Materials
We aim to create programmable materials that can swiftly adapt their structures, and henceforth their functional properties on demand. We combine studies of mechanics involving fundamental deformation mechanisms, microfabrication, and mechanical characterization techniques to merge structural and functional materials through a digitized, perturbative loop.
Programmable shape morphing
Distributed stimuli offer ways to deform local structures at fast speeds. We create a soft material architecture that consists of a mesh of optimized, planar serpentine conductive features. Programmable voltage control of electrical current enables distributed electromagnetic actuation on the surface in a static magnetic field. We found that the serpentine mesh structure exhibits a linear input-output (voltage-displacement) relationship. This unusual linear relationship of large deformation allows a model-driven approach for inverse design to reproduce complex, continuous shape-morphing processes. We also developed automated imaging methods for in-situ 3D shape reconstruction. Provided the digital actuation and in-situ sensing capability, with resolvable errors between the model-driven output and the target, we implemented an experiment-driven optimization strategy that automatically perturbs control voltages and minimizes the error according to a gradient estimation. The resulting metasurface can deform to target shapes without prior knowledge of the underlying physics.
Image
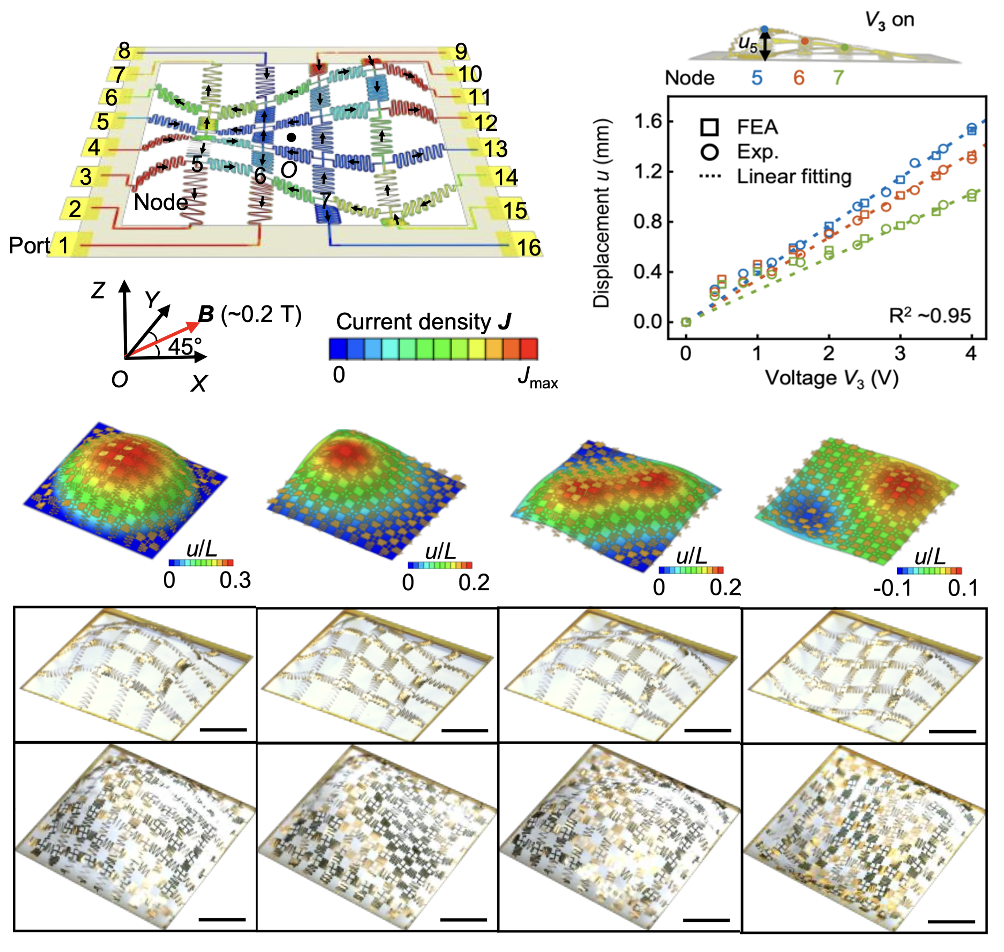
Y. Bai, H. Wang, Y. Xue, Y. Pan, J-T. Kim, Xinchen Ni, T.L. Liu, Y. Yang, M. Han, Y. Huang*, J.A. Rogers*, and Xiaoyue Ni*, A dynamically reprogrammable surface with self-evolving shape morphing, Nature 609 (7928), 701-708 (2022)
Xinchen Ni, H. Luan, J-T. Kim, S.I. Rogge, Y. Bai, J.W. Kwak, S. Liu, D.S. Yang, S. Li, S. Li, Z. Li, Y. Zhang, C. Wu, Xiaoyue Ni*, Y. Huang*, H. Wang, J.A. Rogers, Soft shape-programmable surfaces by fast electromagnetic actuation of liquid metal networks, Nature communications 13 (1), 1-9 (2022)
Programmable thermal expansion
We have demonstrated 2D metamaterials with a widely tunable coefficient of thermal expansion, including the first demonstration of an unusual shear mode of thermal expansion. The work involves a new fabrication strategy that uses precision laser cutting to achieve bi-material serpentine lattices with micrometer-scale feature sizes. The experimental results are supported by the theoretical model and the finite element analysis (FEA) simulations. The work establishes a continuum-mechanics platform based on flexible mechanical metamaterials for advanced strain-field engineering through integrated electrical and optical sources of thermal actuation. Integrated electrical and optical sources of thermal actuation enable fast reversible control of local lattice deformation.
Image
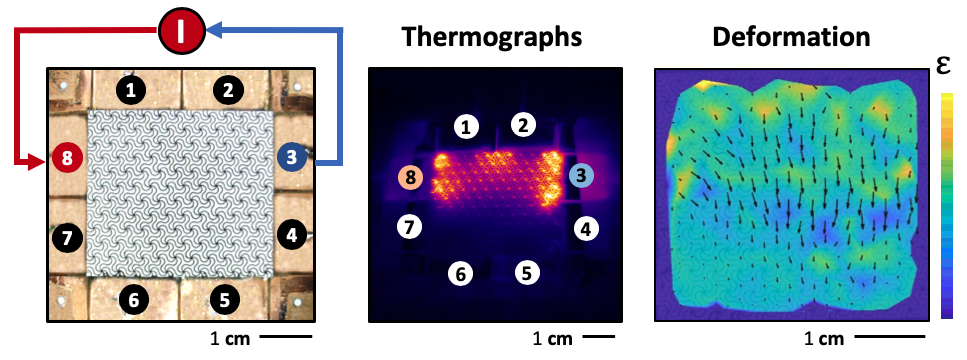
X. Ni, X. Guo, J. Li, Y. Huang, Y. Zhang*, and J.A. Rogers*, "Two-dimensional mechanical metamaterials with widely-tunable unusual modes of thermal expansion", Advanced Materials 31 (48), 1905405 (2019)
X. Guo, X. Ni, J. Li, H. Zhang, F. Zhang, H. Yu, J. Wu, Y. Bai, H. Lei, Y. Huang*, J.A. Rogers*, Y. Zhang*, Designing mechanical metamaterials with kirigami‐inspired, hierarchical constructions for giant positive and negative thermal expansion, Advanced Materials 33 (3), 2004919 (2021)
Epidermal Electronics
We aim to create soft health monitoring devices together with advanced computational techniques to capture and decode biosignals comfortably and accurately.
Mechano-acoustic sensing
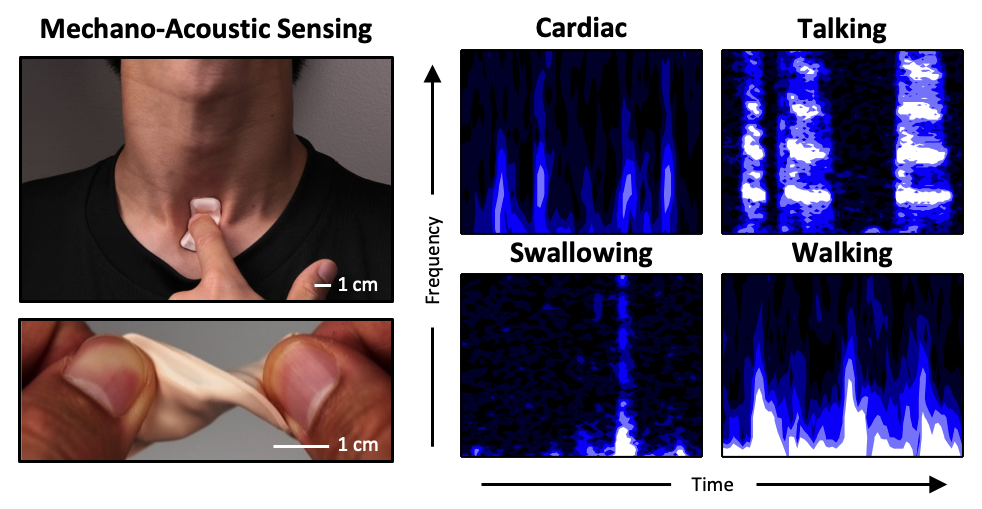
A human interacts with the environment and others and generates mechano-acoustic (MA) signals that contain critical information about bioactivities. Most of the signals attenuate at the skin-air interface but epidermal electronics create a path to capture them. We have invented a wearable mechano-acoustic (MA) sensing technique, which is a wireless, soft, skin-mounted electronic system that incorporates MEMS accelerometers with capabilities of recording body kinematics, along with multimodal MA signatures of underlying body processes, similar to those captured with stethoscope. Our work focuses on engineering the conformal form of mechano-acoustic detection at anatomy positions of interest, especially those hard for conventional wearable devices with rigid, planar form factors to couple to. The aim is to capture a multitude of human-body mechanics to decode human actions or status in high dimensions. We also work on frequency-domain analysis and machine learning approaches to interpret the networked, high-density MA data streams for advanced monitoring modalities, such as in-vivo, constitutive characterizations of tissues and organs. The goal is to investigate broad classes of biomechanical processes and their inference of the underlying functional properties of the mechanical body.
Image
X. Ni, W. Ouyang, H. Jeong, J.T. Kim, A. Tzaveils, A. Mirzazadeh, C. Wu, J.Y. Lee, M. Keller, C.K. Mummidisetty, M. Patel, N. Shawen, J. Huang, H. Chen, S. Ravi, J.K. Chang, K. Lee, Y. Wu, F. Lie, Y.J. Kang, J.U. Kim, L.P. Chamorro, A.R. Banks, A. Bharat, A. Jayaraman, S. Xu*, J.A. Rogers*, "Automated, multiparametric monitoring of respiratory biomarkers and vital signs in clinical and home settings for COVID-19 patients", Proceedings of the National Academy of Sciences (2021)
K. Lee, X. Ni, J.Y. Lee, H. Arafa, D. Pe, S. Xu, R. Avila, M. Irie, J.H. Lee, R.L. Easterlin, D.H. Kim, H.U. Chung, O.O. Olabisi, S. Getaneh, E. Chung, M. Hill, J. Bell, H.K. Jang, C. Liu, J.B. Park, J. Kim, S.B. Kim, S. Mehta, M. Pharr, A. Tzavelis, J.T. Reeder, I. Huang, Y. Deng, Z. Xie*, C.R. Davies*, Y. Huang*, and J.A. Rogers*, "Mechano-acoustic sensing of physiological processes and body motions using soft, wireless devices interfaced to the skin at the suprasternal notch", Nature Biomedical Engineering 4, 148–158 (2020)
News
List of news articles
Current Members
List of lab members